The purpose of this activity was to illustrate the importance of ground control points (GCPs) in processing UAS imagery and creating accurate digital models of the Earth's surface. The data used for this project was the same as the previous activity, only GCPs were used in the data processing to create a result that is accurate and represents the true elevation of the area surveyed.
GCPs are points on the ground used to "tie down" an image to the representation of Earth's surface, either based on a geoid or an ellipsoid. They are used to georeference images so that the locations on the images can be accurately located on the digital representative surface. Sixteen GCPs were used when surveying the Litchfield mine. They were spread out throughout the area of the mine so that when the resulting data would be processed distortion could be minimized. Because the processing done in the last activity was done using no GCPs, the elevation was based on a ellipsoid, which is the default for DJI and other surveying platforms. The GCPs allow the elevation data to be processed using a geoid, based on sea level, which is the desired result.
The study area is the same as the previous lab, the Litchfield Mine near Eau Claire, Wisconsin.
Methods
Basically the same process was used in this lab as the previous one, the only difference being the use of GCPs in the data processing.
The first step was to save the project after initial processing from the previous lab with a new name in a new folder. Then the GCP manager was opened in the project tab, as shown in Figure 1.
 |
| Figure 1: The GCP manager is shown where the GCPs were to be imported. |
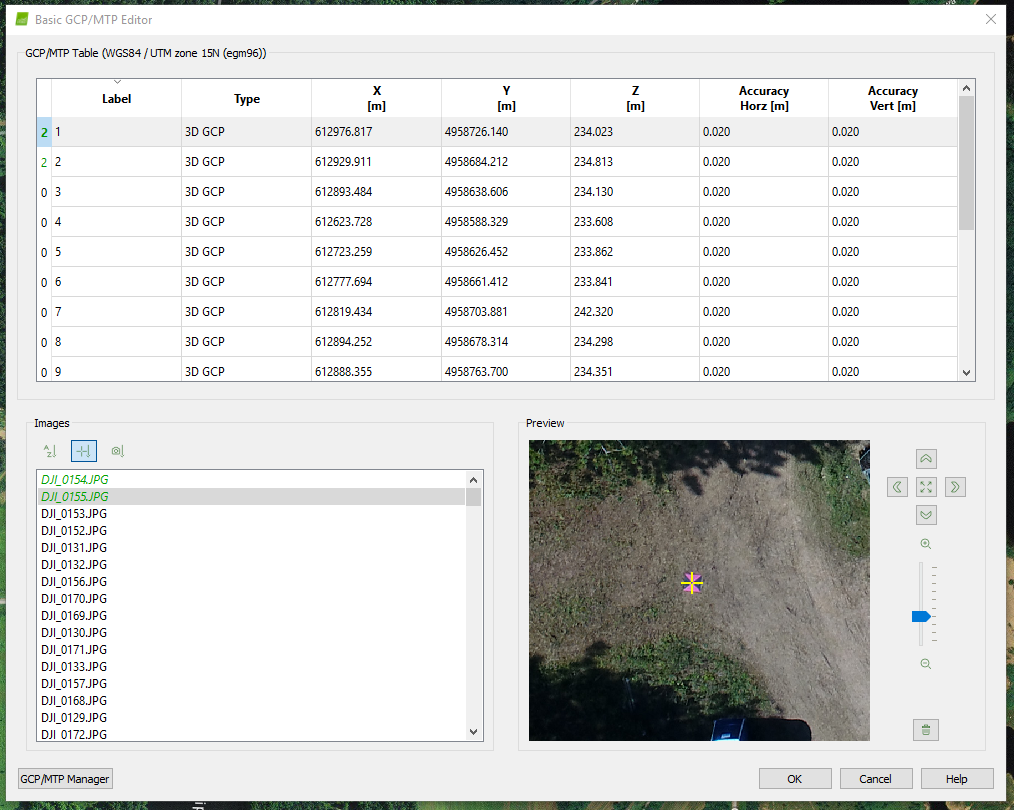 |
| Figure 2: The GCPs are clicked to their location by zooming into the cross of each GCP in the images. |
 |
| Figure 3: The lower right corner shows the images with the GCPs where the crosses showing their exact location on the image can be adjusted to exactly where they should be, at the cross hairs of the square GCP. |
It was then reoptimized again. Then the processing was run for 2. Point Cloud and Mesh and 3. DSM and Orthomosaic. Figures 4 and 5 show the quality reports for these processes.
 |
| Figure 4: The quality report from part 2. in processing. |
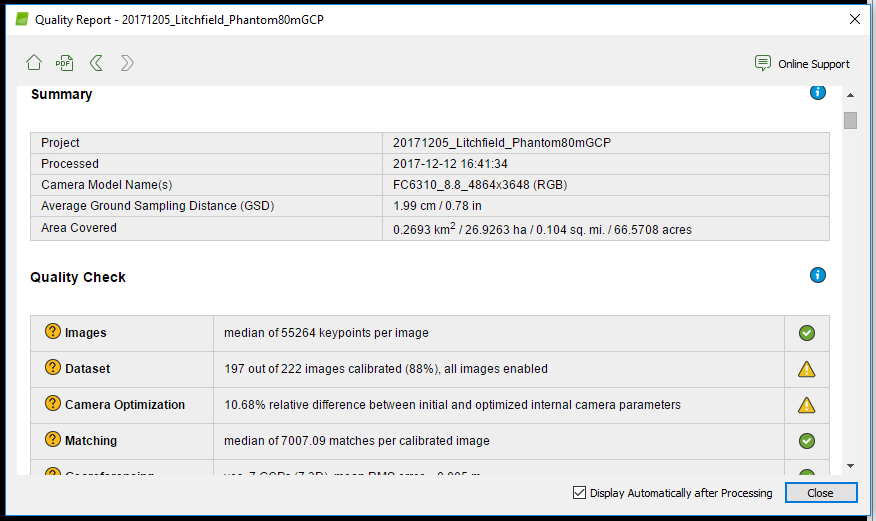 |
| Figure 5: The quality report from part 3. in processing. |
 |
| Figure 6: Arcviewer displays the surface model in 3D with the location of each GCP throughout the mine. |
Now that the processing was completed, the DSM and mosaic images were brought into ArcMap to create maps of the outputs.
Results
 |
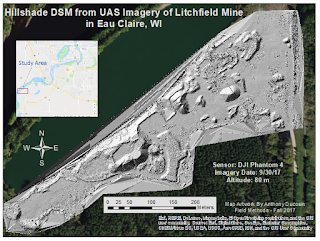
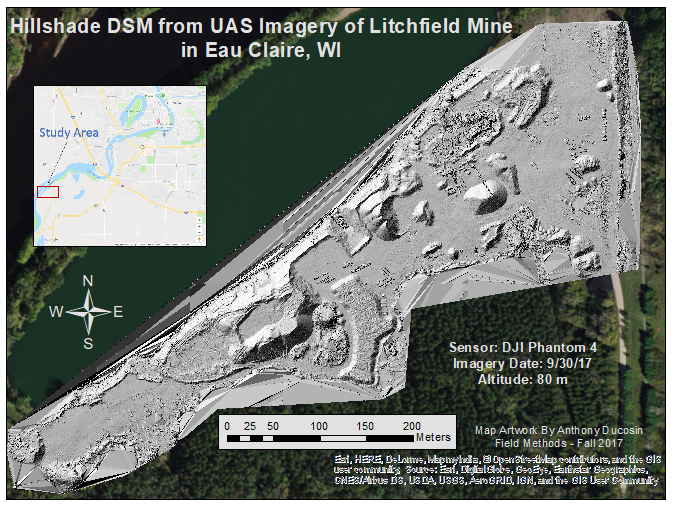
| Figure 7: This map shows the DSM created using GCPs from the UAS imagery. When comparing this to the image/map created with the same process but no GCP's, the main difference is the difference in elevation values. This map shows the correct elevation between approximately 225 meters and 250 meters. The previous map had a low of about 80 meters and a high of about 105 meters. Because this map used GCPs it was able to use the correct elevation. This is easily notable because the Eau Claire area lies in general between 700ft and 800ft, not around 300ft like the previous map showed. The use of GCPs also allowed for a more accurate depiction of elevation change within the mine. When calculating the difference of the map highs and lows for each map, the difference in elevation on map with GCPs is 23.708 meters, and the difference in elevation on map without GCP's is 24.1971. When surveying/modeling an area and using volumetrics even one foot can mean a difference in quite a lot of material, so using GCPs ensures much more precision and is the more trusted method. |
 |
| Figure 8: This map shows the orthomosaic using the GCPs from the UAS imagery of the mine. When comparing this to the map using the same process but without the GCPs, it is hard to notice much of a difference. Though there are very slight differences observed when looking at this scale, it ends up looking very similar. The knowledge that this image/map used GCPs and acquired the correct elevation makes this the desired result of the processing. |
Conclusion
The results of the processing with GCPs doesn't look too much different than the results from the previous lab, however when looking at the legend of each map one can observe the difference by over one hundred meters is very important. Using GCPs helps to acquire not only the correct height above sea level for the entire orthomosaic image, but it also helps to create a more accurate model that shows the terrain and change in elevation throughout the mine.

















{kind=link}